Grazie a una nuova tecnica di scansione laser, i ricercatori possono ora stampare in 3D anche materie plastiche speciali con un'elasticità straordinaria. Ciò consente di produrre strutture simili a quelle umane, aprendo nuove possibilità per la robotica morbida.

In breve
- I ricercatori stanno rendendo la stampa 3D adatta ai polimeri a lenta polimerizzazione, ampliando così in modo significativo le possibilità della robotica morbida. Perché i nuovi materiali sono migliori dei precedenti.
- Questo è possibile grazie a una nuova tecnologia che combina la stampa 3D con uno scanner laser e un meccanismo di feedback.
- Uno spin-off negli Stati Uniti offre ora questa tecnologia e stampa oggetti complessi su richiesta del cliente.
La stampa 3D sta facendo rapidi progressi e la gamma di materiali utilizzabili è cresciuta in modo significativo. Mentre in precedenza la tecnologia era limitata alle plastiche a polimerizzazione rapida, grazie a ulteriori sviluppi è ora possibile utilizzare anche le plastiche a polimerizzazione lenta. E queste presentano vantaggi decisivi: hanno migliori proprietà elastiche e sono più durevoli e robuste.
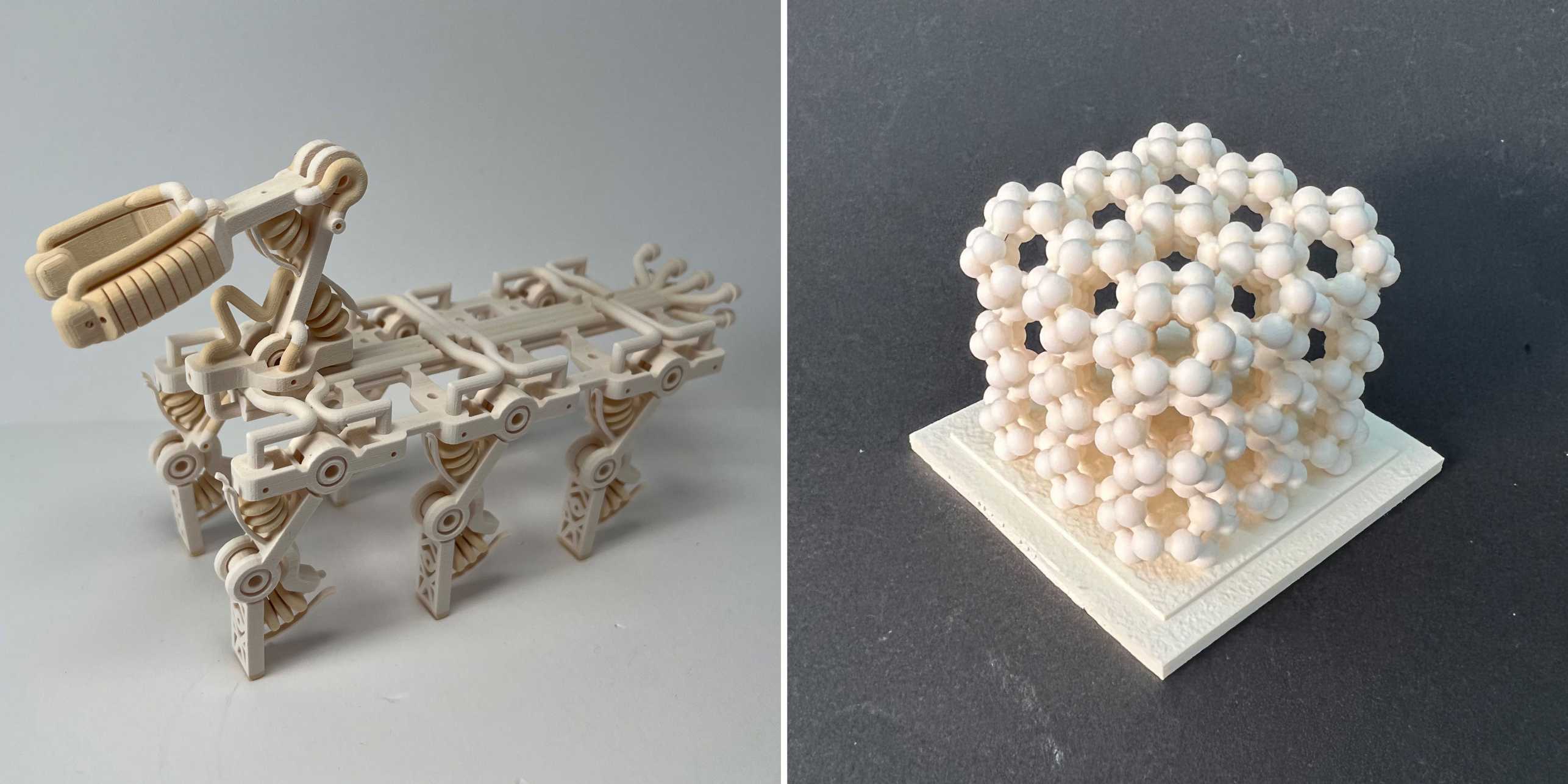
L'uso di questi polimeri è reso possibile da una nuova tecnologia sviluppata da ricercatori del Politecnico di Zurigo e da una start-up americana. I ricercatori possono ora produrre anche robot complessi e più resistenti con materiali diversi e di alta qualità utilizzando la stampa 3D. E tutto in un solo passaggio. La tecnologia consente inoltre di combinare facilmente materiali morbidi, elastici e solidi. I ricercatori possono anche utilizzarla per creare parti con cavità e strutture delicate.
Salto dei materiali allo stato iniziale
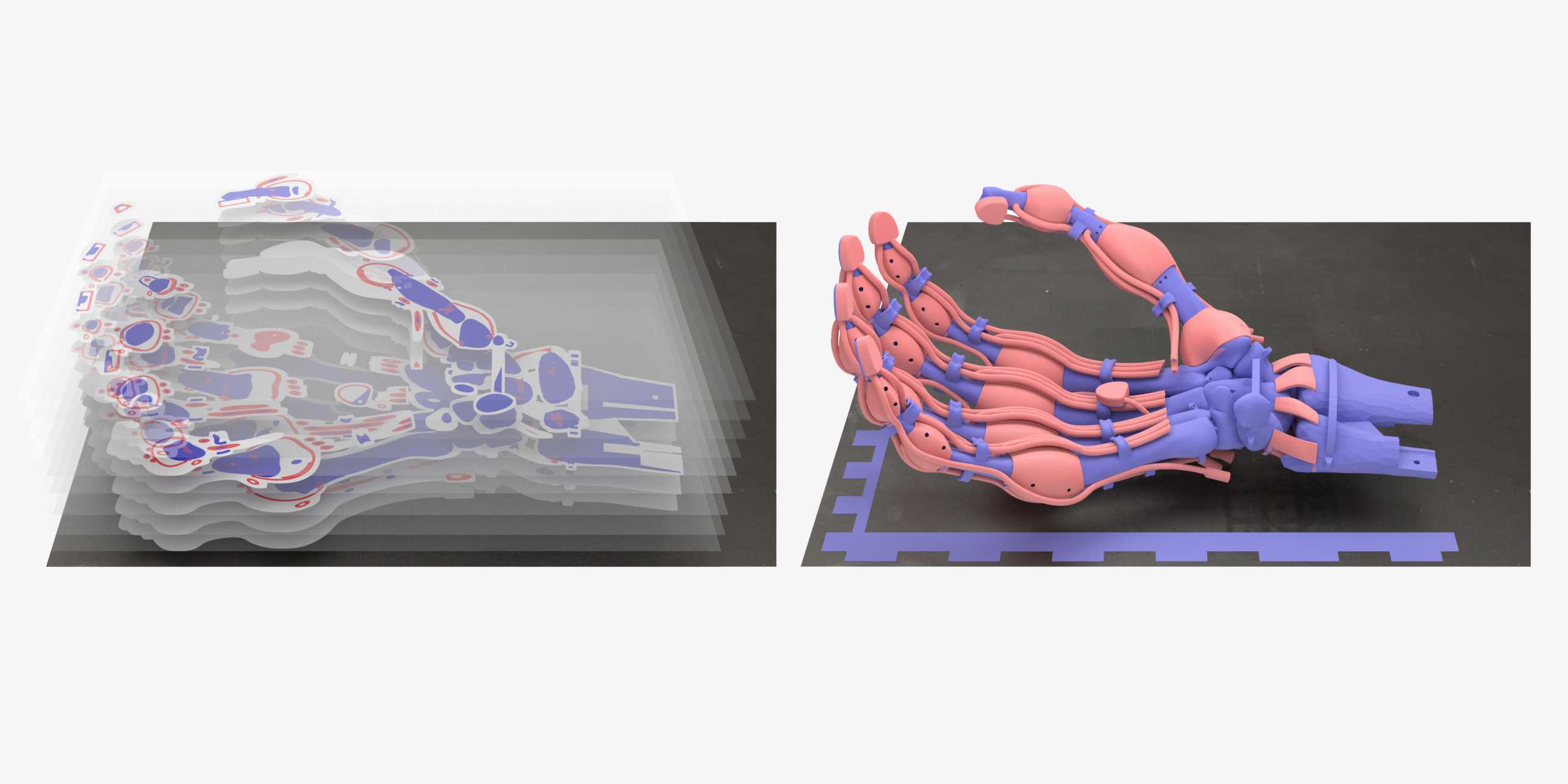
Utilizzando la nuova tecnologia, i ricercatori del Politecnico di Zurigo sono riusciti per la prima volta a stampare una mano robotica con ossa, legamenti e tendini realizzati con polimeri diversi in un unico passaggio. "Finora non saremmo stati in grado di produrre questa mano con i poliacrilati a polimerizzazione rapida che utilizzavamo nella stampa 3D", spiega Thomas Buchner, dottorando del gruppo del professore di robotica dell'ETH Robert Katzschmann e primo autore dello studio. "Stiamo utilizzando nuovi polimeri di tiolene a polimerizzazione lenta. Questi hanno ottime proprietà elastiche e ritornano al loro stato originale molto più velocemente dei poliacrilati dopo la piegatura". I polimeri di tiolene sono quindi ideali per produrre le bande elastiche della mano robotica.
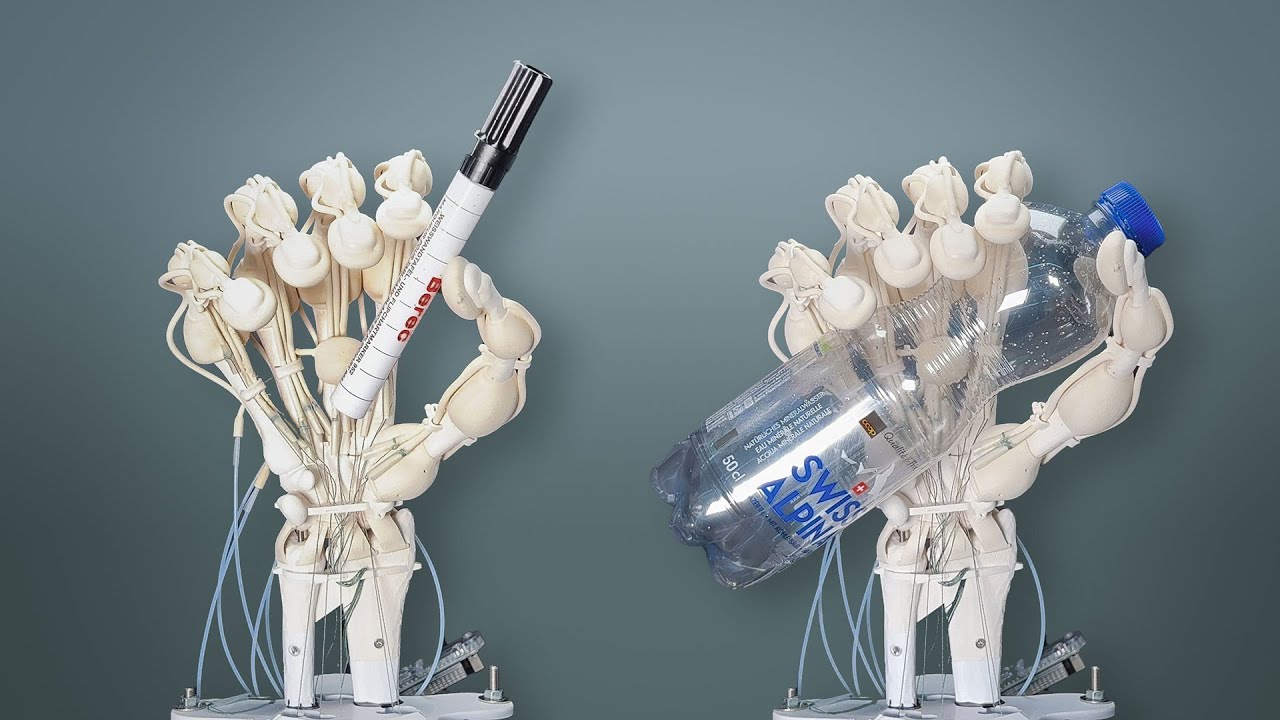
Inoltre, la rigidità dei tioli può essere regolata molto finemente e quindi adattata ai requisiti dei robot morbidi. "I robot realizzati con materiali morbidi, come la mano che abbiamo sviluppato, presentano dei vantaggi rispetto ai robot convenzionali in metallo: essendo morbidi, riducono il rischio di lesioni quando lavorano con l'uomo e sono più adatti a gestire merci fragili", spiega il professor Katzschmann dell'ETH.
Scansione invece di raschiare
Le stampanti 3D generalmente producono oggetti strato per strato: gli ugelli applicano il materiale desiderato in forma viscosa in ogni punto. Una lampada UV polimerizza immediatamente ogni strato. I processi precedenti prevedono un dispositivo che raschia le irregolarità dopo ogni fase di polimerizzazione. Questo funziona solo con i poliacrilati a polimerizzazione rapida. I polimeri a polimerizzazione lenta, come i tioleni e gli epossidici, si attaccherebbero al dispositivo di raschiatura.
Per consentire ai ricercatori di utilizzare polimeri a lenta polimerizzazione, hanno sviluppato ulteriormente la stampa 3D: uno scanner laser 3D controlla immediatamente ogni strato stampato per individuare eventuali irregolarità. "Un meccanismo di feedback compensa queste irregolarità durante la stampa dello strato successivo, calcolando in tempo reale le regolazioni precise della quantità di materiale da stampare", spiega Wojciech Matusik, professore al Massachusetts Institute of Technology (MIT) negli USA e coautore dello studio. Ciò significa che la nuova tecnologia non livella più le irregolarità, ma ne tiene semplicemente conto al momento di stampare lo strato successivo.
La società Inkbit, spin-off del MIT, è stata responsabile dello sviluppo della nuova tecnologia di stampa. I ricercatori del Politecnico di Zurigo hanno sviluppato diverse applicazioni robotiche e hanno contribuito a ottimizzare la tecnologia di stampa per l'uso di polimeri a lento indurimento. I ricercatori svizzeri e statunitensi stanno ora pubblicando congiuntamente la tecnologia e gli esempi di applicazione sulla rivista specializzata pagina esternaLa natura.
All'ETH di Zurigo, il gruppo di Robert Katzschmann utilizzerà questa tecnologia per esplorare ulteriori possibilità, progettare strutture ancora più sofisticate e sviluppare ulteriori applicazioni. L'azienda Inkbit intende utilizzare la nuova tecnologia per offrire ai clienti un servizio di stampa 3D e per vendere stampanti.
Letteratura di riferimento
Buchner TJK, Rogler S, Weirich S, Armati Y, Cangan BG, Ramos J, Twiddy S, Marini D, Weber A, Chen D, Ellson G, Jacob J, Zengerle W, Katalichenko D, Keny C, Matusik W, Katzschmann RK: Vision-Controlled Jetting for Composite Systems and Robots, Nature, 15 novembre 2023, doi: pagina esterna10.1038/s41586-023-06684-3