Neue Bildgebungsmethode macht Kleinstroboter im Körper sichtbar
Mikroroboter k?nnen die Medizin revolutionieren. Nun haben Forschende am Max Planck ETH Center for Learning Systems ein Bildgebungs-Verfahren entwickelt, das zellgrosse Mikroroboter erstmals einzeln und hochaufgel?st in einem lebenden Organismus erkennt.
Wie l?sst sich ein Blutgerinnsel ohne einen grossen chirurgischen Eingriff aus dem Hirn entfernen? Wie bringt man ein Medikament pr?zise zu einem schwer erreichbaren, erkrankten Organ? Das sind nur zwei Beispiele f¨ąr die zahlreichen Innovationen, die Forschende im Gebiet der medizinischen Mikrorobotik anpeilen. Die winzigen Roboter versprechen, k¨ąnftige medizinische Behandlungen grundlegend zu ver?ndern: Eines Tages k?nnten sie sich durch die Blutgef?sse von Patient:innen bewegen, um b?sartige Tumore zu beseitigen, Infektionen zu bek?mpfen oder pr?zise diagnostische Informationen zu liefern ¨C und das alles auf nicht-invasive Weise. Im Prinzip, so die Forschenden, k?nnte der Blutkreislauf als ideales Transportnetz f¨ąr die Mikroroboter dienen, da es alle Organe und Gewebe im K?rper erreicht.
Damit solche Mikroroboter die vorgesehenen medizinischen Eingriffe sicher und zuverl?ssig durchf¨ąhren k?nnen, d¨ąrfen sie nicht gr?sser als eine biologische Zelle sein. Beim Menschen hat eine Zelle im Schnitt einen Durchmesser von 25 Mikrometer ¨C dabei betr?gt ein Mikrometer ein Millionstel Meter. Die kleinsten Blutgef?sse des Menschen, die Kapillaren, sind sogar noch d¨ąnner: Ihr Durchmesser betr?gt im Schnitt nur 8 Mikrometer. Entsprechend klein m¨ąssen die Mikroroboter sein, wenn sie die kleinsten Blutgef?sse ungehindert durchqueren sollen. Damit sind sie zugleich so klein, dass sie von blossem Auge nicht zu sehen sind ¨C und auch die Wissenschaft hat noch keine technische L?sung gefunden, um die mikrometerkleinen Roboter im K?rper einzeln zu erkennen und zu verfolgen.
Erstmals zirkulierende Mikroroboter abgebildet
?Bevor dieses Zukunftsszenario Realit?t wird, und die Mikroroboter tats?chlich am Menschen zum Einsatz kommen, ist es absolut erforderlich, dass wir diese winzigen Maschinen pr?zise sichtbar machen und nachverfolgen k?nnen?, sagt Paul Wrede, Doktorand und Fellow am Max Planck ETH Center for Learning Systems (externe SeiteCLS). ?Ohne Bildgebung ist die Mikrorobotik im Grunde blind?, erg?nzt Daniel Razansky, externe SeiteProfessor f¨ąr Biomedizinische Bildgebung der ETH Z¨ąrich und der Universit?t Z¨ąrich sowie Mitglied des CLS. ?Eine hochaufl?sende Bildgebung in Echtzeit ist daher unerl?sslich, um zellgrosse Mikroroboter in einem lebenden Organismus zu erkennen und zu steuern.?

?Ohne Bildgebung ist die Mikrorobotik im Grunde blind.?Daniel Razansky
Weiter ist die Bildgebung auch eine Voraussetzung, um die erfolgten therapeutischen Eingriffe zu ¨ąberwachen und zu ¨ąberpr¨ąfen, ob die Roboter ihre Aufgabe wie vorgesehen erf¨ąllt haben. ?Die fehlende M?glichkeit, ein Echtzeit-?Feedback zu den Mikrorobotern zu geben, war daher ein grosses Hindernis auf dem Weg zu einer klinischen Anwendung.?
Zusammen mit Metin Sitti, einem weltweit f¨ąhrenden Mikrorobotiker, der als Abteilungsleiter am Max-???Planck-??Institut f¨ąr Intelligente Systeme (MPI-?IS) und ETH-?Professor f¨ąr Physische Intelligenz ebenfalls CLS-?Mitglied ist, sowie weiteren Forschenden hat das Team nun einen wichtigen Durchbruch in der effizienten Zusammenf¨ąhrung von Mikrorobotik und Bildgebung erzielt. In einer Studie, die soeben im Wissenschaftsjournal Science Advances erschienen ist, schafften sie es erstmals, bis zu f¨ąnf Mikrometer winzige Kleinstroboter mit einem nichtinvasiven, bildgebenden Verfahren in den Hirn-?Blutgef?ssen von M?usen klar und in Echtzeit nachzuweisen und zu verfolgen.
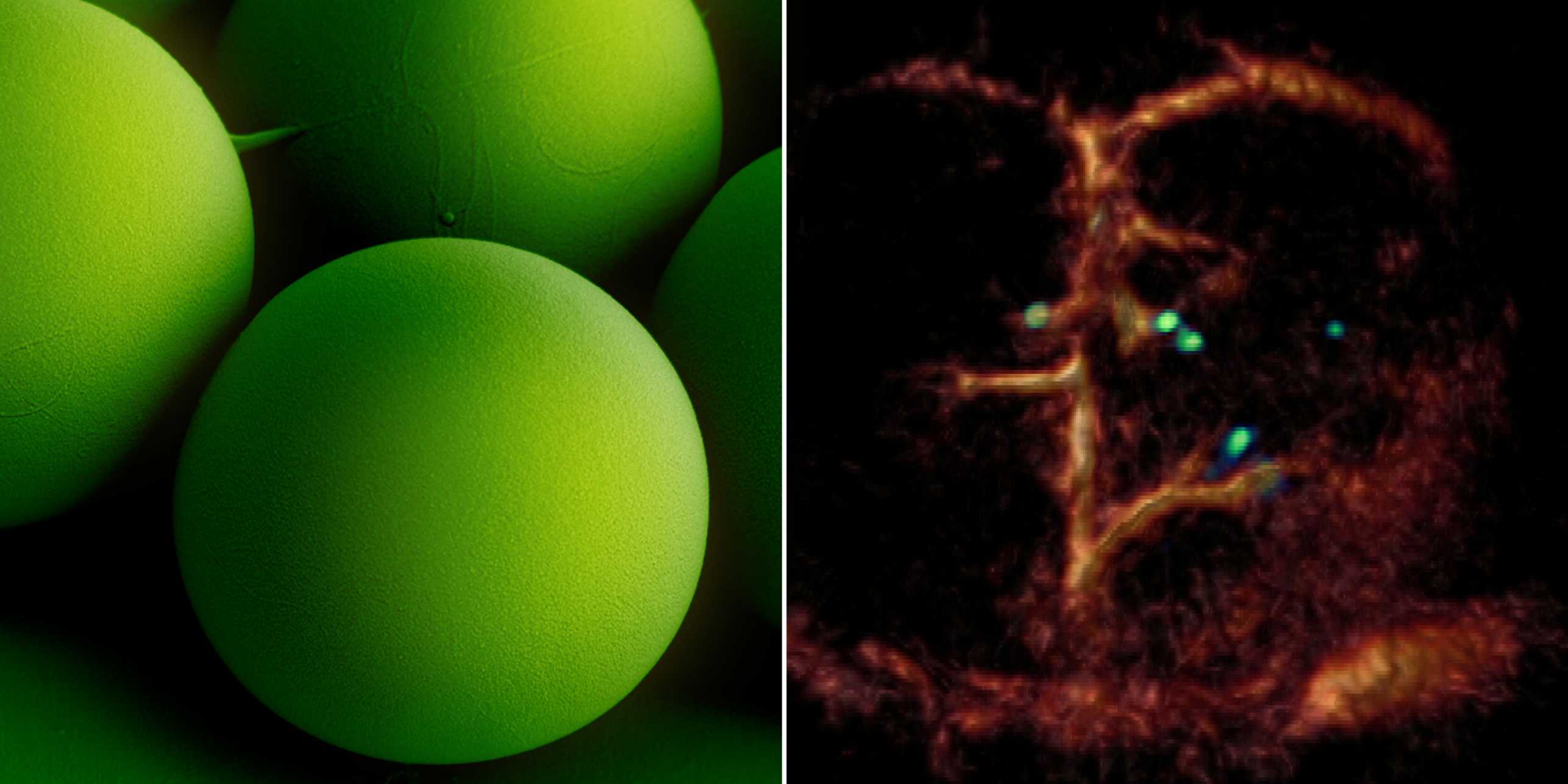
Die Forschenden setzten Mikroroboter mit einer Gr?sse von 5 bis 20 Mikrometern ein. Die kleinsten Roboter sind etwa so gross wie die roten Blutk?rperchen, die einen Durchmesser von 7 bis 8 Mikrometern haben. Diese Gr?sse macht es m?glich, dass sich die intraven?s injizierten Mikroroboter selbst durch die d¨ąnnsten Mikrokapillaren im Hirn einer Maus fortbewegen k?nnen. Die Forschenden entwickelten auch eine spezielle optoakustische Tomographietechnik, um die klitzekleinen Roboter tats?chlich einzeln, hochaufgel?st und in Echtzeit zu erkennen.
Diese einzigartige Bildgebungsmethode erm?glicht es, die winzigen Roboter in tiefen und schwer zug?nglichen Regionen des K?rpers und des Gehirns aufzusp¨ąren, was mit optischer Mikroskopie oder einer anderen Bildgebungstechnik nicht m?glich gewesen w?re. Die Methode wird als optoakustisch bezeichnet, weil man zun?chst Licht aussendet, das vom jeweiligen Gewebe absorbiert wird. Die Absorption erzeugt dann winzige Ultraschallwellen, die man erkennen und analysieren kann, um hochaufl?sende volumetrische Bilder zu erhalten.
Janusk?pfige Roboter mit Goldschicht
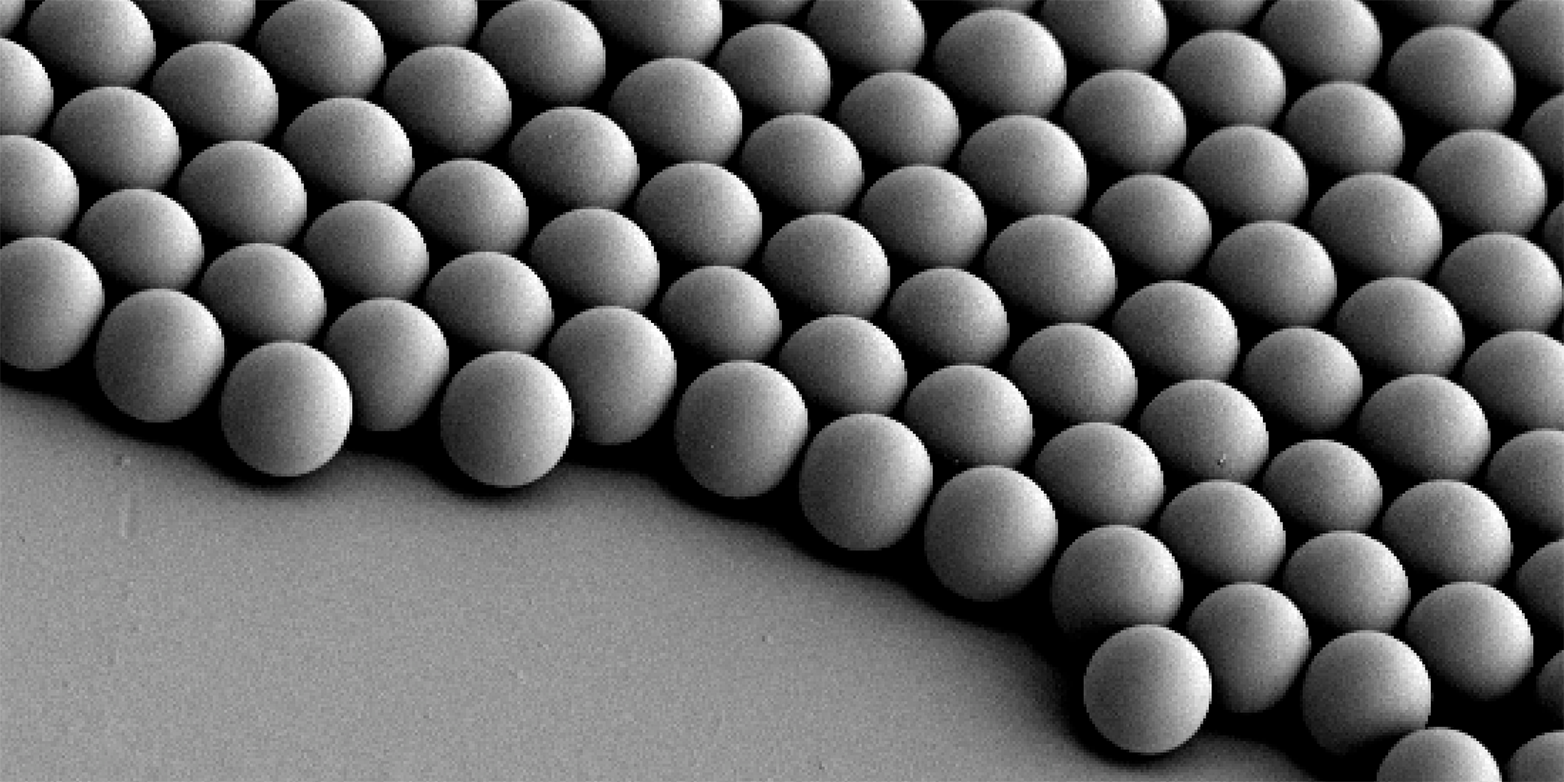
Um die Mikroroboter auf den Bildern deutlich sichtbar zu machen, ben?tigten die Forschenden ein geeignetes Kontrastmittel. F¨ąr ihre Studie verwendeten sie deshalb kugelf?rmige Mikroroboter auf der Basis von Siliziumdioxidpartikeln mit einer sogenannten Janus-Beschichtung. Dieser Roboter-Typ hat ein sehr robustes Design und eignet sich sehr gut f¨ąr anspruchsvolle medizinische Aufgaben. Benannt ist er nach dem r?mischen Gott Janus, der zwei Gesichter besass. Bei den Robotern sind die beiden Kugelh?lften jeweils unterschiedlich beschichtet. Im aktuellen Fall beschichteten die Forschenden die eine Roboterh?lfte mit Nickel und die andere mit Gold.
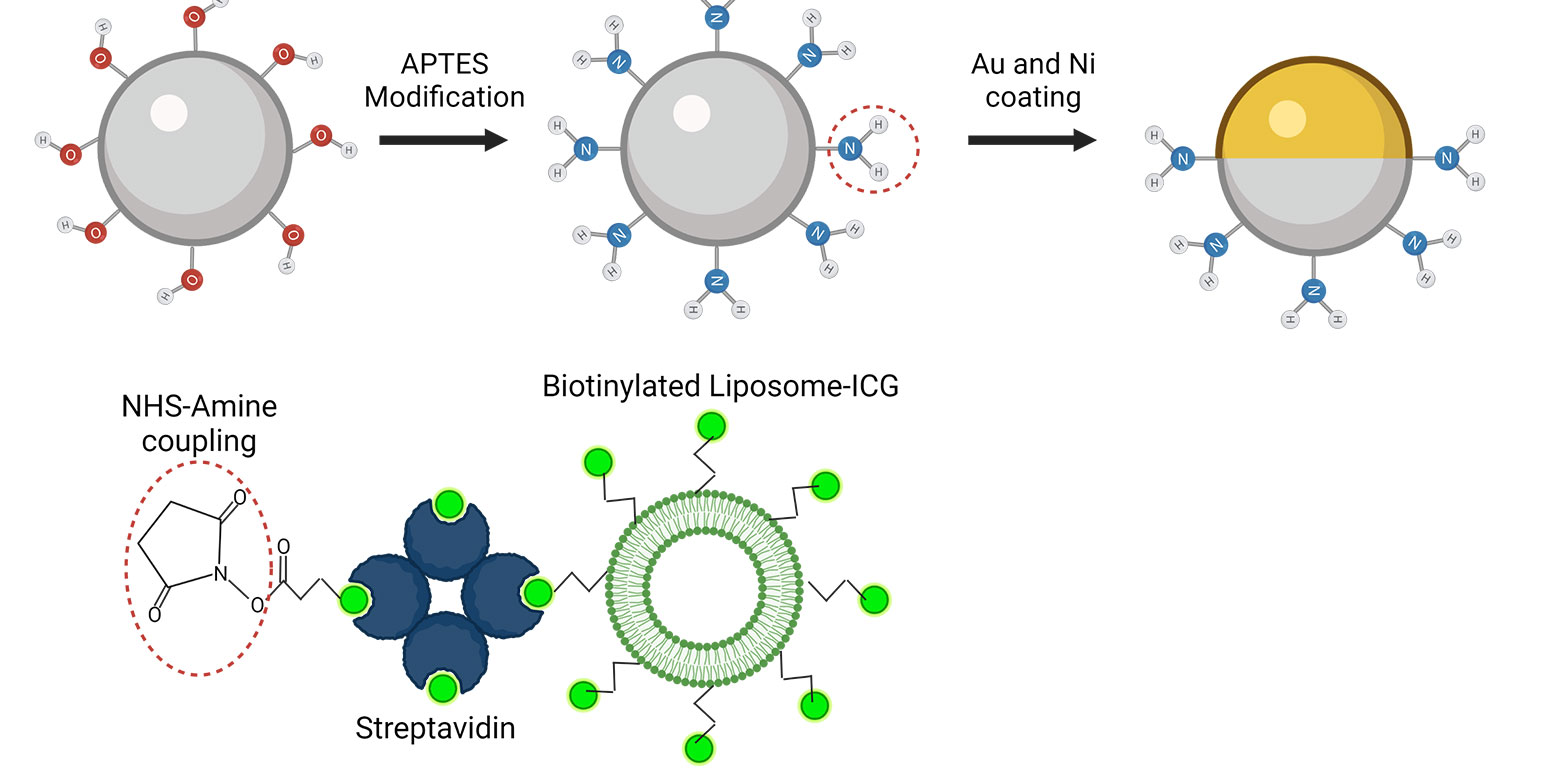
?Gold ist ein sehr gutes Kontrastmittel f¨ąr die optoakustische Bildgebung?, erkl?rt Razansky, ?ohne die Goldschicht ist das von den Mikrorobotern erzeugte Signal schlicht zu schwach, um erkannt zu werden.? Zus?tzlich zum Gold testeten die Forschenden die Verwendung kleiner Bl?schen, so genannte Nanoliposomen, die einen fluoreszierenden, gr¨ąnen Farbstoff enthielten, der ebenfalls als Kontrastmittel diente. ?Liposomen haben zudem den Vorteil, dass man sie mit Medikamenten beladen kann, was f¨ąr k¨ąnftige Ans?tze zur gezielten Verabreichung von Medikamenten wichtig ist?, sagt Wrede, der Erstautor der Studie. Die Einsatzm?glichkeiten der Liposomen werden in einer Folgestudie untersucht.
Mit dem Gold l?sst sich zudem die zelltoxische Wirkung der Nickelbeschichtung minimieren ¨C schliesslich m¨ąssen die k¨ąnftigen Mikroroboter, wenn sie in lebenden Tieren oder Menschen eingesetzt werden sollen, biovertr?glich und ungiftig sein, was Teil einer laufenden Forschungsarbeit ist. In der vorliegenden Studie verwendeten die Forschenden Nickel als magnetisches Antriebsmedium zusammen mit einem einfachen Permanentmagneten, um die Roboter zu ziehen. In Folgestudien wollen sie die optoakustische Bildgebung auch mit einer komplexeren Bewegungssteuerung testen, die rotierende Magnetfelder verwendet.
?Das g?be uns die M?glichkeit, die Mikroroboter auch in stark fliessendem Blut pr?zise zu steuern und zu bewegen?, sagt Metin Sitti. ?In der vorliegenden Studie haben wir uns darauf konzentriert, die Mikroroboter sichtbar zu machen. Das Projekt war sehr erfolgreich dank der exzellenten Zusammenarbeit am CLS, die es erm?glichte, die Expertise der beiden Forschungsgruppen des MPI-IS in Stuttgart f¨ąr den Roboterteil und der ETH Z¨ąrich f¨ąr den bildgebenden Teil zu kombinieren?, schliesst er.
Max Planck ETH Center for Learning Systems
Das Max Planck ETH Center for Learning Systems (externe SeiteCLS) ist ein gemeinsames Lehr- und Forschungszentrum der ETH Z¨ąrich und der Max-Planck-Gesellschaft im Gebiet der intelligenten Systeme. Rund 50 Forschende beider Institutionen engagieren sich im CLS. Das Herzst¨ąck des CLS ist das Doktorandenf?rderprogramm. Die Doktorierenden werden gemeinsam von ETH-Professor:innen und Max-Planck-Direktor:innen und -Gruppenleiter:innen betreut und erlangen am Ende einen Doktortitel der ETH Z¨ąrich.
Literaturhinweis
Wrede P, Degtyaruk O, Kalva SK, De¨˘n-Ben XL, Bozuyuk U, Aghakhani A, Akolpoglu B, Sitti M, Razansky D. Real-time 3D optoacoustic tracking of cell-sized magnetic microrobots circulating in the mouse brain vasculature. Science Advances, 11. Mai 2022. DOI: externe Seite10.1126/sciadv.abm9132