Perché i robot possano sentire
Con l'aiuto dell'apprendimento automatico, i ricercatori dell'ETH hanno sviluppato sensori tattili innovativi e a basso costo. I sensori misurano le forze agenti con alta risoluzione e precisione. Essi consentono ai bracci robotici di afferrare oggetti sensibili o fragili.

Noi esseri umani non abbiamo problemi ad afferrare con le mani oggetti fragili o scivolosi. Il nostro senso del tatto ci dice se abbiamo una presa salda su un oggetto o se sta per sfuggirci. Possiamo regolare la nostra forza di conseguenza. Anche i bracci di presa dei robot hanno bisogno di questo tipo di feedback se devono afferrare oggetti fragili o scivolosi o oggetti con una superficie complessa.
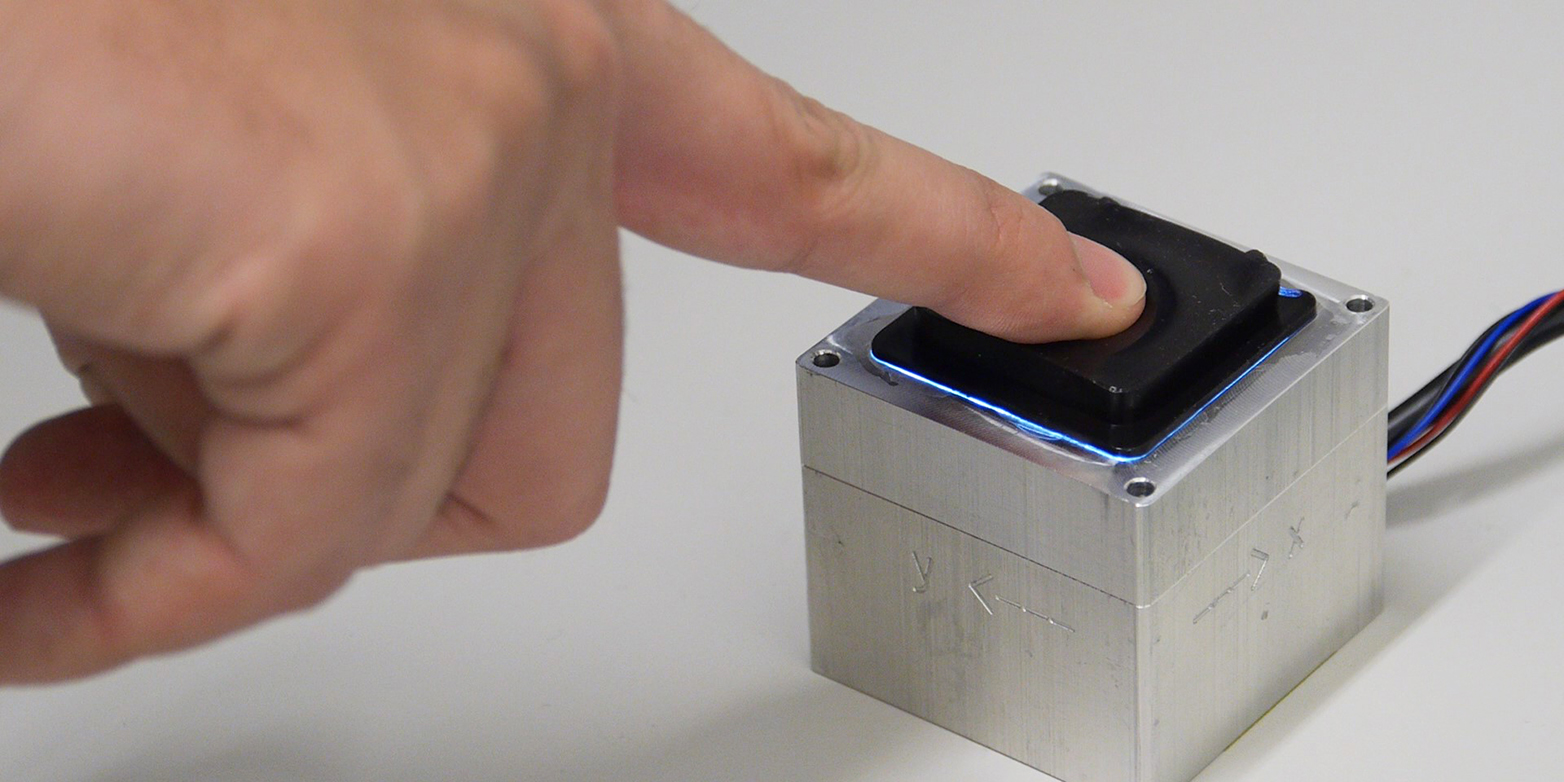
I ricercatori di robotica dell'ETH di Zurigo hanno ora sviluppato un sensore tattile che può essere utilizzato proprio per queste applicazioni - ed è quindi un passo avanti verso quella che gli ingegneri chiamano "pelle di robot". Il sensore ha un design molto semplice ed è quindi poco costoso da produrre, come sottolineano gli ingegneri. In sostanza, consiste in una pelle elastica di silicone con microsfere di plastica colorata attaccate alla parte inferiore e una telecamera convenzionale.
Misura ottica pura
Il sensore funziona otticamente: quando il sensore tocca un oggetto, la pelle di silicone si deforma. Questo cambia anche il disegno delle microsfere, che viene registrato dalla telecamera fisheye sul lato inferiore del sensore. Il disegno può essere utilizzato per calcolare le forze che agiscono sul sensore.
"I sensori di forza convenzionali registrano solo la forza applicata in un singolo punto. Con la nostra pelle robotica, invece, possiamo distinguere tra diverse forze che agiscono sulla superficie del sensore e determinarle con alta risoluzione e precisione", spiega Carlo Sferrazza. ? un dottorando del gruppo di Raffaello D'Andrea, professore di Ingegneria del controllo all'ETH di Zurigo. "Possiamo anche determinare la direzione da cui agisce una forza", dice Sferrazza. Ciò significa che i ricercatori possono determinare non solo le forze di compressione che agiscono verticalmente sul sensore, ma anche le forze di taglio trasversali.

Sviluppo guidato dai dati
Per calcolare quali spostamenti delle microsfere sono causati da quali forze, gli ingegneri hanno utilizzato un'ampia serie di dati sperimentali: hanno testato un gran numero di diversi tocchi del sensore in modo controllato dalla macchina e quindi standardizzato, controllando con precisione e variando sistematicamente la posizione del tocco, la forza applicata e la dimensione dell'oggetto toccato. Con l'aiuto dell'apprendimento automatico, sono stati in grado di collegare con precisione queste diverse migliaia di tocchi registrati ai cambiamenti nel disegno delle perline.
Il prototipo di sensore più sottile finora realizzato dai ricercatori ha uno spessore di 1,7 centimetri e una superficie di misura di 5 x 5 centimetri. Tuttavia, gli ingegneri stanno lavorando per sviluppare, con la stessa tecnologia, superfici di sensori più grandi, che utilizzino più telecamere e siano in grado di riconoscere anche oggetti dalle forme complesse. I ricercatori vogliono anche rendere il sensore più sottile: secondo loro, uno spessore di 0,5 centimetri sarebbe concepibile con la tecnologia attuale.
Robotica, sport e realtà virtuale
Poiché il silicone elastico è antiscivolo e il sensore è in grado di misurare le forze di taglio, è adatto per equipaggiare bracci di presa robotici. "Il sensore riconoscerebbe quando un oggetto minaccia di scivolare dal braccio di presa, permettendo al robot di regolare la sua forza", spiega Sferrazza.
I ricercatori potrebbero utilizzare questo sensore anche per testare la durezza dei materiali o per registrare digitalmente il tatto. Progettati come indossabili, i ciclisti potrebbero misurare la loro trasmissione di potenza alla bicicletta o ai pedali, così come i corridori potrebbero misurare la trasmissione di potenza alle loro scarpe quando fanno jogging. Infine, questi sensori potrebbero fornire informazioni importanti nello sviluppo di feedback tattili per i giochi di realtà virtuale, ad esempio.
Riferimento alla letteratura
Sferrazza C, Wahlsten A, Trueeb C, D'Andrea R: Ground Truth Force Distribution for Learning-Based Tactile Sensing: A Finite Element Approach. IEEE Access 2019, doi: pagina esterna10.1109/ACCESS.2019.2956882
Sferrazza C, D'Andrea R: Progettazione, motivazione e valutazione di un sensore tattile ottico a piena risoluzione. Sensors 2019, 19: 928, doi: pagina esterna10.3390/s19040928