Pour que les robots puissent ressentir
A l'aide de l'apprentissage automatique, les chercheurs de l'ETH ont développé de nouveaux capteurs tactiles bon marché. Les capteurs mesurent les forces en présence avec une haute résolution et une grande précision. Ils permettent aux bras robotisés de saisir des objets sensibles ou fragiles.

Nous, les humains, n'avons aucun problème à saisir des objets fragiles ou glissants avec les mains. ? propos du toucher, nous sentons si nous tenons fermement un objet ou s'il est sur le point de nous échapper. Nous pouvons alors doser notre force en conséquence. Les bras préhenseurs des robots ont également besoin d'un tel retour d'information lorsqu'ils doivent saisir des objets fragiles ou glissants ou présentant une surface complexe.
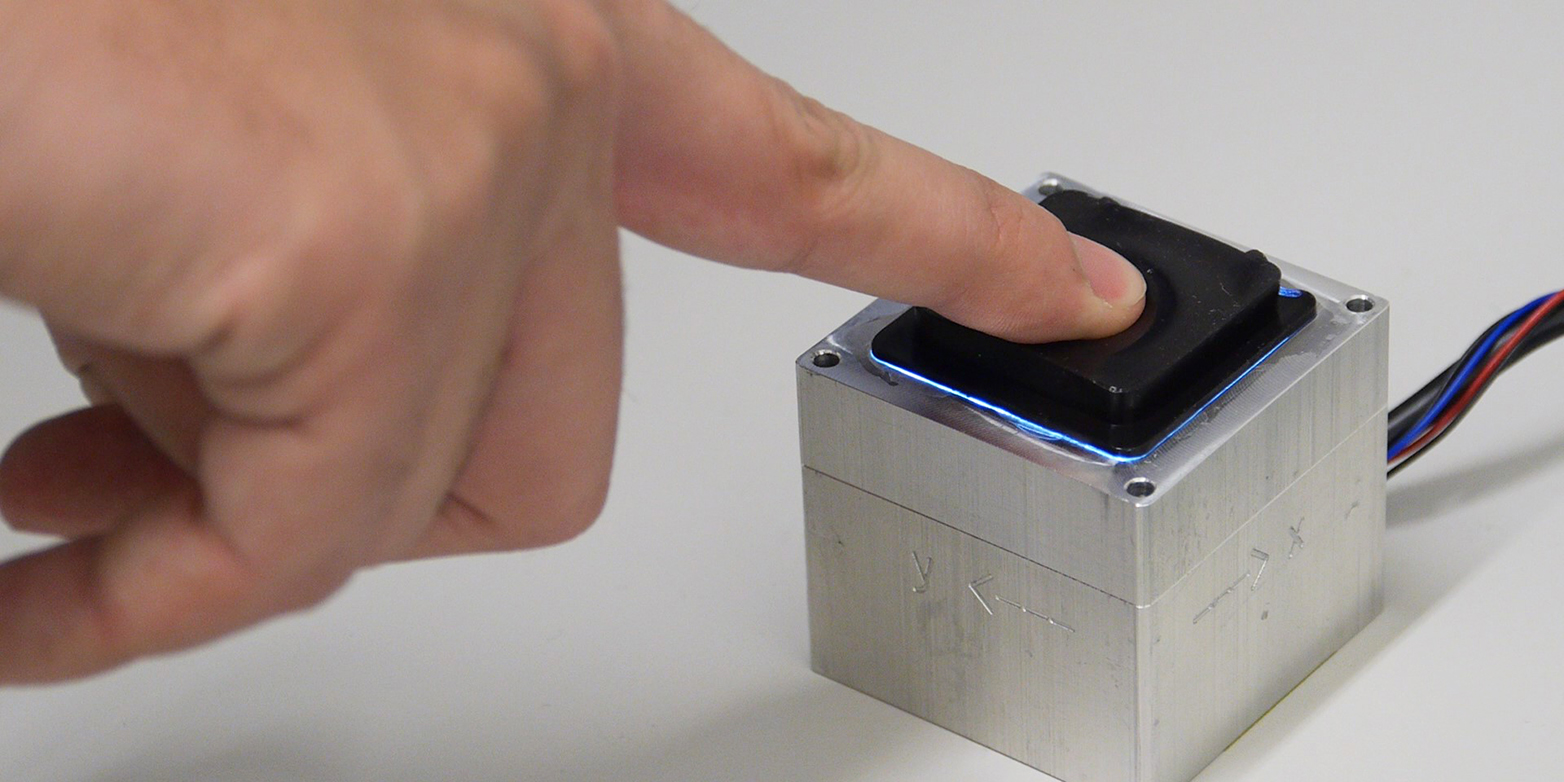
Des chercheurs en robotique de l'ETH Zurich viennent de mettre au point un capteur tactile qui peut justement être utilisé pour de telles applications - et qui constitue donc un pas vers ce que les ingénieurs appellent la "peau du robot". Le capteur est de conception très simple et donc peu co?teux à fabriquer, comme le soulignent les ingénieurs. Il se compose essentiellement d'une peau élastique en silicone, sur la face inférieure de laquelle sont fixées des microsphères colorées en plastique, ainsi que d'une caméra classique.
Mesure purement optique
Le capteur fonctionne de manière optique : lorsque le capteur touche un objet, la peau en silicone se déforme. Le motif des microsphères se modifie alors, ce que la caméra fish-eye située sur la face inférieure du capteur enregistre. Le modèle permet ensuite de calculer les forces qui agissent sur le capteur.
"Les capteurs de force traditionnels n'enregistrent la force appliquée qu'en un seul point. Avec notre peau de robot, nous pouvons en revanche distinguer plusieurs forces agissant sur la surface du capteur et les déterminer avec une grande résolution et précision", explique Carlo Sferrazza. Il est doctorant dans le groupe de Raffaello D'Andrea, professeur de technique de régulation à l'ETH Zurich. "En outre, nous pouvons déterminer la direction dans laquelle une force agit", ajoute Sferrazza. Cela signifie que les chercheurs peuvent déterminer non seulement les forces de pression agissant verticalement sur le capteur, mais aussi les forces de cisaillement agissant transversalement.

Développement piloté par les données
Pour pouvoir calculer quels déplacements des microsphères sont dus à quelles forces, les ingénieurs ont utilisé un vaste ensemble de données expérimentales : ils ont testé, de manière automatisée et donc standardisée, un grand nombre de contacts différents avec des capteurs, en contr?lant précisément et en faisant varier systématiquement l'endroit du contact, l'effet de la force et la taille de l'objet touché. Gr?ce à l'apprentissage automatique, ils sont parvenus à établir un lien précis entre ces milliers de contacts enregistrés et les modifications du motif des billes.
Le prototype de capteur le plus fin que les chercheurs ont construit jusqu'à présent a une épaisseur de 1,7 centimètre et une surface de mesure de 5 centimètres sur 5. Les ingénieurs sont toutefois en train de développer, avec la même technique, des surfaces de capteurs plus grandes, utilisant plusieurs caméras et capables de détecter des objets aux formes complexes. En outre, les chercheurs souhaitent rendre le capteur plus fin - selon eux, une épaisseur de 0,5 centimètre serait envisageable avec la technologie actuelle.
Robotique, sport et réalité virtuelle
Comme le silicone élastique est antidérapant et que le capteur peut mesurer les forces de cisaillement, il se prête bien à l'équipement de bras de préhension robotisés. "Le capteur détecterait si un objet risque d'échapper au bras préhenseur, ce qui permettrait au robot d'adapter sa force", explique Sferrazza.
Avec un tel capteur, les chercheurs pourraient en outre tester la dureté des matériaux ou enregistrer numériquement les contacts. Con?us comme des wearables, les cyclistes pourraient mesurer la force qu'ils transmettent au vélo ou aux pédales, tout comme les coureurs pourraient mesurer la force qu'ils transmettent à leurs chaussures lors de leur jogging. Enfin, de tels capteurs pourraient fournir des informations importantes lors du développement du feedback tactile, par exemple pour les jeux de réalité virtuelle.
Référence bibliographique
Sferrazza C, Wahlsten A, Trueeb C, D'Andrea R : Ground Truth Force Distribution for Learning-Based Tactile Sensing : A Finite Element Approach. IEEE Access 2019, doi : page externe10.1109/ACCESS.2019.2956882
Sferrazza C, D'Andrea R : Design, Motivation and Evaluation of a Full-Resolution Optical Tactile Sensor. Sensors 2019, 19 : 928, doi : page externe10.3390/s19040928