Ce robot maintient tout en suspension
En tant que Pioneer Fellow de l'ETH, Marcel Schuck développe un robot capable de saisir de petites pièces sensibles sans les toucher. Cela est possible gr?ce aux ondes sonores.

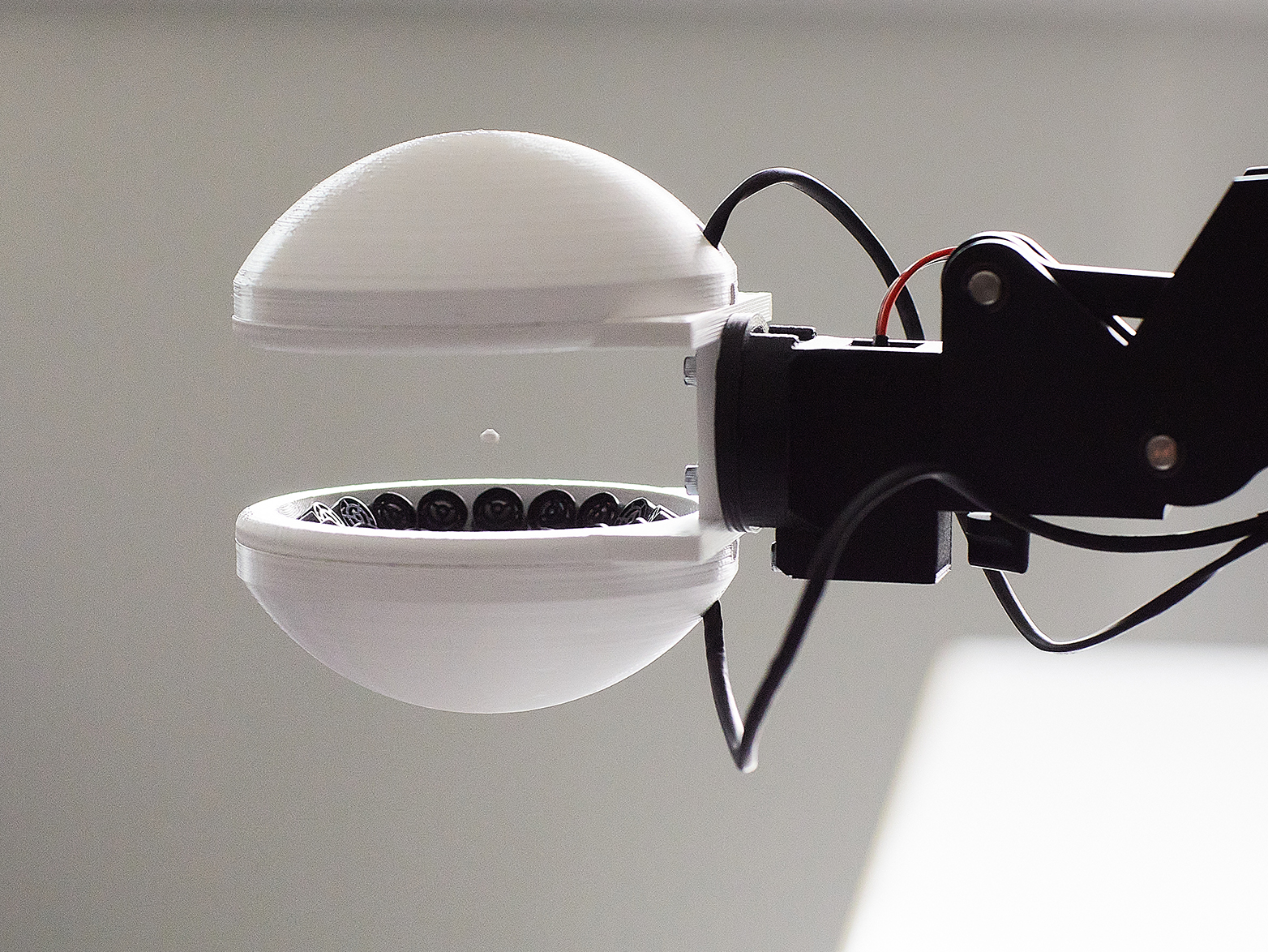
La petite installation que Marcel Schuck a montée sur une plaque de bois à sa place de travail rappelle les cours de physique : une longue pince composée de deux hémisphères, qui ressemble à un casque d'écoute, est reliée à une platine munie d'une puce électronique. Avec cet arrangement, il démontre un effet physique : une petite sphère flotte en effet entre les demi-sphères. Elle est maintenue en l'air par des ondes ultrasoniques. "On parle de lévitation acoustique", explique le scientifique.
L'ancien doctorant de l'ETH développe actuellement, dans le cadre d'un fellowship de pionnier de l'ETH, un procédé qui permet de soulever et de manipuler de petits objets sans aucun contact. Cela est particulièrement pertinent là où les dommages causés aux petites pièces co?tent cher, par exemple dans l'industrie horlogère ou des semi-conducteurs.
Lorsqu'un robot normal saisit des objets sensibles, quelque chose se casse rapidement. C'est pourquoi, dans la pratique, on utilise souvent des préhenseurs souples, en caoutchouc. Ceux-ci ne causent certes aucun dommage, mais ils sont souillés par les contacts comme une gomme très utilisée. En outre, la précision de positionnement est limitée avec de tels "Soft Robotic Grippers".
Saisir sans toucher : C'est le principe qui sous-tend le projet de Schuck intitulé "No Touch-Robotics". Il est rendu possible par un effet utilisé depuis plus de 80 ans et surtout dans la recherche spatiale. Les ondes ultrasonores créent un champ de pression invisible et inaudible pour nous. En superposant les ondes acoustiques, on crée des points de pression où les petits objets peuvent être capturés. En conséquence, ils semblent être suspendus librement dans l'air - ils flottent dans le piège acoustique.

Des avantages économiques aussi
L'installation dans son laboratoire est le prototype du produit que Schuck souhaite développer à moyen terme : un préhenseur à ultrasons commandé par un robot. Le jeune homme de 31 ans a intégré de nombreux mini-haut-parleurs dans deux demi-sphères fabriquées par impression 3D. A l'aide d'un logiciel, il peut les commander de manière à pouvoir déplacer les points de pression. L'objectif à long terme est de modifier leur position en temps réel, sans que l'objet en suspension ne tombe au sol. C'est précisément ce à quoi s'attelle le doctorant de l'ETH Marc R?thlisberger, qui forme une communauté de laboratoires avec Schuck ainsi qu'avec l'étudiant en master Christian Burkard au Technopark Zurich.
La technologie existante permet déjà aux chercheurs de déplacer différentes petites pièces dans l'espace. Le logiciel adapte la pince à la forme de l'objet à soulever et le bras robotisé le transporte jusqu'à sa destination.
Le principe de la préhension sans contact présente également un avantage économique : celui qui travaille avec un robot normal a besoin d'un préhenseur séparé pour presque chaque nouvelle forme. Le préhenseur à ultrasons rend superflu l'ensemble complet de préhenseurs de haute précision (et co?teux). Le bras du robot lui-même n'a même pas besoin d'être très précis. "Le positionnement exact est assuré par les ondes ultrasonores commandées par le logiciel", explique Schuck.
Dans le cadre de son ETH-Pioneer-Fellowship, Schuck souhaite d'abord découvrir comment les bras préhensiles robotisés sont utilisés dans la pratique. "L'objectif principal est de conna?tre les domaines d'application et d'ouvrir des portes dans l'industrie", explique Schuck. L'innovation devrait être intéressante pour l'industrie horlogère, où la micromécanique de précision est obligatoire en raison des petites pièces précieuses. "Les roues dentées des montres, par exemple, sont d'abord enduites de lubrifiant, puis l'épaisseur de cette couche est mesurée. Même les contacts les plus fins pourraient détruire la fine pellicule de lubrifiant". La production de micro-puces pourrait également être un marché intéressant pour la technologie de Schuck.
Dans le cadre du fellowship financé à hauteur de 150 000 francs, Schuck crée une sorte de valise d'expérimentation pour des clients potentiels. Elle contient une pince de robot, un logiciel de commande et un mode d'emploi. Schuck souligne qu'il ne sait pas encore à quoi ressemblera le produit final. "Cela dépendra des réactions de l'industrie". Il espère trouver quelques personnes intéressées avec lesquelles il pourra continuer à développer le préhenseur à ultrasons - de sorte que celui-ci réponde d'une part à la demande du marché. D'autre part, le procédé ne doit pas seulement fonctionner en laboratoire, mais aussi dans la pratique. S'il y parvient d'ici le printemps 2021, Schuck peut très bien s'imaginer fonder une entreprise avec son idée commerciale.