Vola, uccello micromeccanico, vola!
I ricercatori dell'ETH di Zurigo e dell'Istituto Paul Scherrer (PSI) hanno sviluppato una micromacchina a forma di uccello. Grazie a nanomagneti programmati magneticamente, questo microrobot può "volare" in varie manovre in un campo magnetico - e forse un giorno eseguire piccole operazioni nel corpo umano.
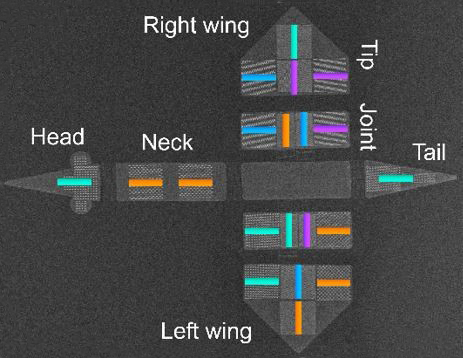
Misura solo pochi micrometri (pochi milionesimi di metro) e ricorda un uccello origami. Ma a differenza dei manufatti pieghevoli fatti di carta, questo robot si muove come per magia, senza che alcuna forza visibile agisca su di lui. Sbatte le ali, piega il collo e ritrae la testa. Queste azioni sono rese possibili dal magnetismo.
I ricercatori dell'Istituto Paul Scherrer (PSI) e dell'ETH di Zurigo hanno assemblato la micromacchina con materiali contenenti, tra l'altro, piccoli nanomagneti. Gli scienziati, guidati da Laura Heyderman, che dirige l'Istituto congiunto per i sistemi mesoscopici, hanno programmato questi nanomagneti per adottare uno specifico orientamento magnetico. Quando i nanomagneti programmati vengono esposti a un campo magnetico, agiscono su di essi forze specifiche.
Quando questi magneti sono posizionati nei componenti flessibili dell'uccello origami, le forze che agiscono su di essi li fanno muovere. I nanomagneti possono essere riprogrammati più volte. Questo porta a forze diverse che agiscono sulla costruzione e a nuovi movimenti. I ricercatori hanno appena pubblicato i loro risultati sulla rivista scientifica "Nature".
Programmazione dei nanomagneti
Per costruire il microrobot, i ricercatori hanno posizionato file di magneti di cobalto su sottili strati di nitruro di silicio. L'uccello realizzato con questo materiale è stato in grado di eseguire vari movimenti, come svolazzare, agitarsi, girarsi o scivolare lateralmente.
"Questi movimenti del microrobot avvengono nell'ordine dei millisecondi", spiega Heyderman. "La programmazione dei nanomagneti, invece, avviene in pochi nanosecondi", rendendo possibile la programmazione di movimenti diversi. In relazione al modello del microuccello, ciò significa che può, ad esempio, prima svolazzare, poi planare di lato e quindi svolazzare di nuovo. "Se necessario, si può anche farlo agitare tra un movimento e l'altro", dice Heyderman.
Microrobot intelligenti
Questo nuovo concetto è un passo importante verso micro e nanorobot che non solo memorizzano informazioni per una singola azione specifica, ma possono anche essere riprogrammati più volte per svolgere compiti diversi. "? ipotizzabile che in futuro una micromacchina autonoma possa navigare nei vasi sanguigni umani ed eseguire compiti biomedici come l'uccisione di cellule tumorali", spiega Bradley Nelson, capo dell'Istituto di Robotica e Sistemi Intelligenti dell'ETH di Zurigo, il cui laboratorio ha contribuito con la sua esperienza. Altre applicazioni possibili sono la microelettronica flessibile o le microlenti che cambiano le loro proprietà ottiche.
Inoltre, sono possibili applicazioni in cui le proprietà delle superfici cambiano. "Ad esempio, si potrebbero creare superfici che possono essere bagnate dall'acqua o respingerla a seconda delle necessità", spiega Jizhai Cui, ingegnere e ricercatore presso il Laboratory for Mesoscopic Systems di Laura Heyderman al PSI.
Questo testo si basa su un pagina esternacomunicato stampa dell'Istituto Paul Scherrer (PSI).
Letteratura di riferimento
Cui J, Huang T-Y, Luo Z, Testa P, Gu H, Chen X-Z, Nelson BJ, Heyderman LJ. Codifica nanomagnetica di micromacchine a modellazione di forma. Nature, pubblicato online l'11 novembre 2019. DOI: pagina esterna10.1038/s41586-019-1713-2