Alta tecnologia nel pozzo
Il robot "ANYmal" sviluppato all'ETH è in grado di vedere, ascoltare e aprire le porte. Ricercatori di diversi Paesi stanno ora lavorando per garantire che il robot possa funzionare anche in condizioni estreme. La missione li porterà, tra l'altro, nel sottosuolo di Zurigo.

Due uomini sollevano la macchina high-tech di 30 kg e la calano con una corda nell'oscurità del pozzo. Indossiamo tute integrali riflettenti, scambiamo le nostre scarpe con un paio di stivali di gomma alti fino alla coscia, li leghiamo agli occhielli della tuta, aggiungiamo un casco, una torcia e guanti monouso, quindi scendiamo - lungo i gradini nel muro, uno dopo l'altro, a quattro metri di profondità nelle fogne di Zurigo.
In questa calda giornata autunnale, un gruppo di ricercatori sta testando se il robot Anymal, sviluppato dal Robotic Systems Lab e dall'ETH spin-off "ANYbotics", potrà un giorno essere utilizzato nelle fogne. In futuro, potrebbe alleviare il peso dei collaboratori della città di Zurigo, che regolarmente camminano o strisciano attraverso i circa 100 chilometri di tombini accessibili nell'area della città per controllare i danni al pavimento e alle pareti - un lavoro non solo malsano ma anche pericoloso. I tombini possono riempirsi d'acqua in pochissimo tempo. Inoltre, il robot potrebbe operare in fognature che non sono accessibili nemmeno con la tecnologia attuale.
Primo giro di prova
Il robot, che i ricercatori stanno mettendo in piedi nelle profondità del pozzo, è alto circa mezzo metro e ha quattro gambe articolate e una specie di testa composta da una telecamera e vari sensori. La macchina ha un design modulare e può essere aggiornata a seconda dell'applicazione.


Peter Fankhauser, cofondatore dell'ETH che sta commercializzando Anymal, comunica via radio ai suoi colleghi, che coordinano l'azione dalla superficie e impartiscono i comandi al robot. Poi aziona un joystick e il robot avanza. Poiché si tratta della prima corsa su un terreno non familiare, egli controlla parzialmente il robot, che però può muoversi anche autonomamente. "Una misura di sicurezza. Se funziona in laboratorio, non sempre significa che funzionerà nella realtà", spiega Fankhauser. Dopo tutto, il robot deve lavorare in condizioni completamente diverse: Il canale bagnato è scivoloso, la temperatura è più bassa e l'umidità più alta rispetto al laboratorio. E c'è buio.
"Qui è tutto uguale", dice Fankhauser, quasi con voce rassegnata, mentre il robot cammina a passo lento lungo il canale alto tre metri e largo cinque. Il costante rumore elettromeccanico - una sorta di sferragliamento ritmico - si mescola al suono delle acque reflue provenienti dal vicino canale principale. Siamo in una fognatura di riserva ben sviluppata, in cui al momento scorre solo un piccolo rivolo d'acqua: un'altra misura precauzionale per la prima prova pratica con il robot a quattro metri di profondità.
A tentoni nel buio
Il progetto di ricerca triennale THING (subTerranean Haptic InvestiGator) mira a migliorare la percezione dell'ambiente circostante da parte dei robot, consentendo loro di muoversi autonomamente. Di solito i robot si orientano utilizzando telecamere 3D e sensori laser, ma questi sono soggetti a condizioni difficili, come l'acqua sul terreno o la polvere nell'aria. I ricercatori vedono quindi la soluzione nel miglioramento della percezione aptica, ovvero l'orientamento che avviene attraverso il senso del tatto.
I ricercatori dell'ETH hanno collaborato al progetto con i colleghi di Edimburgo, Pisa, Oxford e Poznan. Tutte le scuole universitarie stanno conducendo ricerche con un robot Anymal e si incontrano regolarmente. Oltre ai test nelle fogne, l'anno prossimo si svolgeranno anche prove in una miniera di rame polacca, dove il robot lavorerà in un clima completamente diverso - in un'aria polverosa e calda su un terreno scivoloso. L'ETH è rappresentato dal Laboratorio per i sistemi robotici, diretto dal professore Marco Hutter, la cui pluriennale ricerca sui robot deambulanti è stata sostenuta dall'ETH in una fase iniziale, attraverso una borsa di studio ESOP e una Pioneer Fellowship.
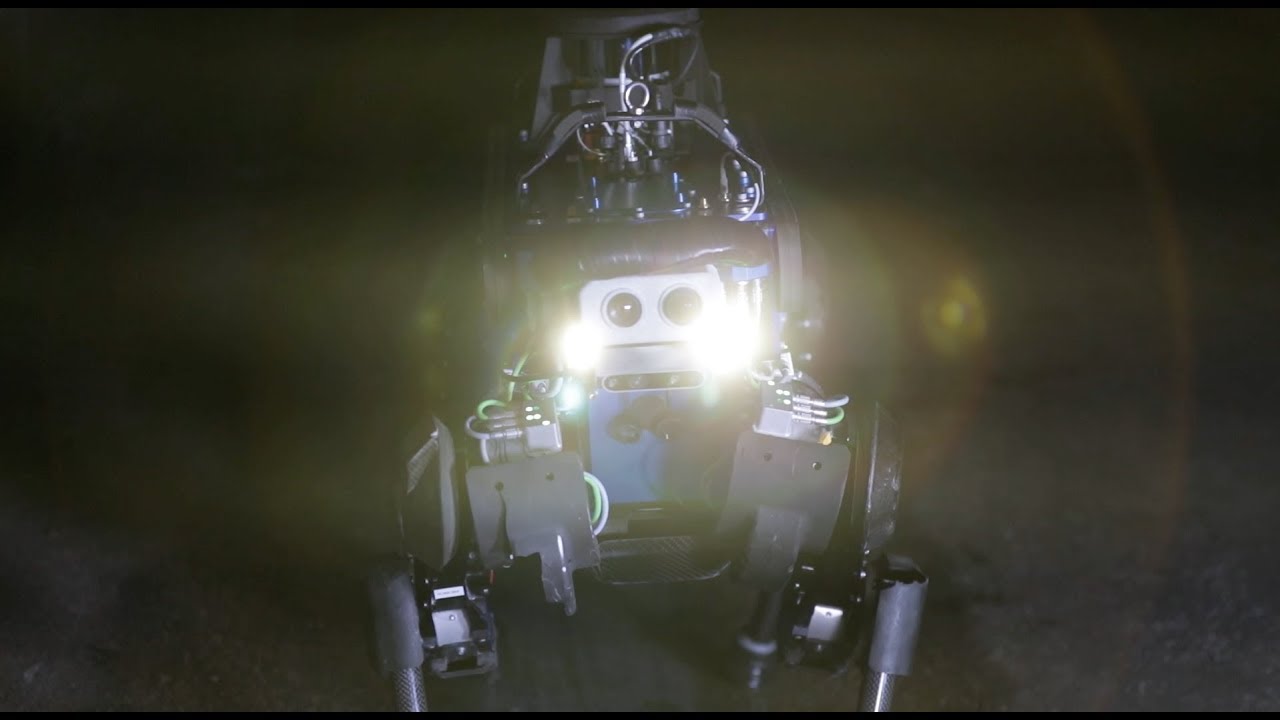
In questo primo giorno di test, una delle domande più importanti è se il robot sia in grado di orientarsi nell'oscurità delle fogne. Inizialmente, due aiutanti sponsorizzano grandi lampade a LED per avere una buona visuale. Fankhauser ordina poi di spegnere la luce esterna e di comunicare via radio con i piani superiori per istruire il robot a usare la propria luce. Al buio, il senso del tatto aiuta, ma non solo. "Il robot utilizza sensori laser e telecamere per scansionare l'ambiente circostante e riconoscere la sua posizione in base alle irregolarità del cemento", spiega Hutter.
Rimangono accese solo le piccole luci LED rotonde sulla "testa" del robot. Ora l'atmosfera della fine è perfetta: il buio, il rumore dell'acqua, lo sferragliare elettromeccanico, gli occhi del robot. "Come un rottweiler", dice uno di loro, rompendo il silenzio che per un attimo si è fatto spaventoso.
Di giorno e in mare aperto

L'ETH fa ricerca all'ETH sui robot a quattro zampe dal 2009. Il prototipo di Anymal è stato creato nel 2015 e un anno dopo è stato fondato lo spin-off Anybotics con l'obiettivo di rendere i robot utilizzabili su tutti i terreni - un prerequisito per molte possibili aree di applicazione nella pratica. "Let Robots Go Anywhere" è lo slogan dell'azienda. Due o tre volte al mese, l'azienda è in giro per i test. Ad esempio, Fankhauser e parte del suo team si sono recati di recente su una piattaforma offshore nel Mare del Nord. Il robot potrebbe un giorno assumere compiti di ispezione in quel luogo: Anymal ha già completato con successo diversi percorsi di ispezione in autonomia durante l'installazione pilota.
Dopo quasi dieci anni di ricerca, Anymal è in grado di fare molto: non solo si muove autonomamente, ma è anche dotato di diversi sensi: può vedere, sentire e percepire. Di conseguenza, il robot può, ad esempio, leggere il display della pressione dell'aria di una macchina, classificare i rumori o riconoscere gli oggetti, ad esempio per verificare se l'estintore è al posto giusto. ? anche in grado di svolgere autonomamente alcuni compiti: Con l'aiuto di un braccio di presa aggiuntivo, può aprire una porta, smaltire i rifiuti o premere un pulsante di sollevamento. Inoltre, fornisce dati più precisi sotto molti aspetti rispetto a quelli forniti dai nostri occhi, orecchie o naso: ad esempio, per quanto riguarda la temperatura, i gas presenti nell'aria o, più recentemente, le condizioni del terreno. "Quindi ha delle capacità sovrumane", dice Fankhauser.
Il robot sembra cavarsela bene nelle fogne, nonostante la mancanza di luce. Cammina tranquillamente attraverso il rivolo. Fankhauser ferma la macchina high-tech con il suo joystick a un gradino alto 20 centimetri in un canale laterale, anch'esso ragionevolmente asciutto. All'inizio esita se istruire il robot a superarlo, una manovra che non sarebbe un problema in laboratorio, ma che qui comporta dei rischi. "C'è anche molto denaro in ballo", dice Fankhauser. Tuttavia, osa provarci. Anymal non riesce nell'impresa al primo tentativo; si ferma prima del tallone, testardo come un cavallo. "Default, ricomincia", dice Fankhauser. Ora il robot mette elegantemente un piede dopo l'altro oltre il bordo.
Un grande flusso di dati
Mentre il robot pattuglia ancora un po' in presenza di Fankhauser e Hutter, torno all'apertura del pozzo e salgo in cima, dove due l'ETH sono seduti su una panchina fissa sotto una tenda bianca, con gli occhi fissi sui loro computer portatili.
Un generatore di elettricità ronza, un router lampeggia e molti ciclisti guardano stupiti ciò che accade intorno al tombino in apertura sul ciglio della strada. Chi siamo, alle spalle dei ricercatori, può vedere un flusso quasi incessante di dati che scorrono sullo schermo. Grazie alla più recente tecnologia 3D e laser, le immagini in diretta del robot sottoterra possono essere viste su uno schermo esterno.
Quando Fankhauser comunica via radio che il robot deve toccare la parete del canale con un piede, i dipendenti dell'ETH sono sfidati. Il software utilizzato non è pre-programmato per questo. Senza ulteriori indugi, utilizzano un algoritmo originariamente programmato per insegnare ad Anymal a stringere la mano. Per evitare che il robot colpisca il muro con tutta la sua forza, i ricercatori devono regolare i parametri, in questo caso l'angolo con cui il robot deve sollevare la gamba. "100", dice uno dei collaboratori, poi aumenta continuamente il valore. A 180 si adatta perfettamente, la manovra funziona.
Ora anche Fankhauser e Hutter lasciano le fresche e umide fogne per il caldo sole autunnale. I loro tratti del viso si rilassano mentre si liberano dei loro indumenti lucidi. "Il robot ha lavorato senza sosta e ha raccolto molti dati", dice Fankhauser mentre si slaccia i lunghi stivali di gomma e si libera della tuta. Anche il professore Hutter è soddisfatto. "Tutte le squadre stanno portando a casa un'ampia serie di dati che potremo utilizzare per ulteriori ricerche". Hanno fatto un passo avanti verso l'obiettivo di garantire che il robot possa funzionare anche in condizioni sotterranee difficili. Ma il lavoro non è ancora finito, anzi: quel giorno il robot ha registrato circa 500.000 misurazioni al secondo. "? abbastanza per mezzo anno di lavoro", dice Fankhauser e ride.