Immersione senza motore
Gli scienziati hanno sviluppato un mini-sottomarino con pale realizzato interamente con la stampa 3D. Funziona senza motore, carburante o elettricità.
I ricercatori dell'ETH di Zurigo, guidati dalla professoressa Kristina Shea, hanno sviluppato un nuovo concetto di propulsione per i robot subacquei insieme ai colleghi del Caltech di Pasadena, in California. L'azionamento sfrutta le fluttuazioni di temperatura dell'acqua e non richiede motore, carburante o alimentazione.
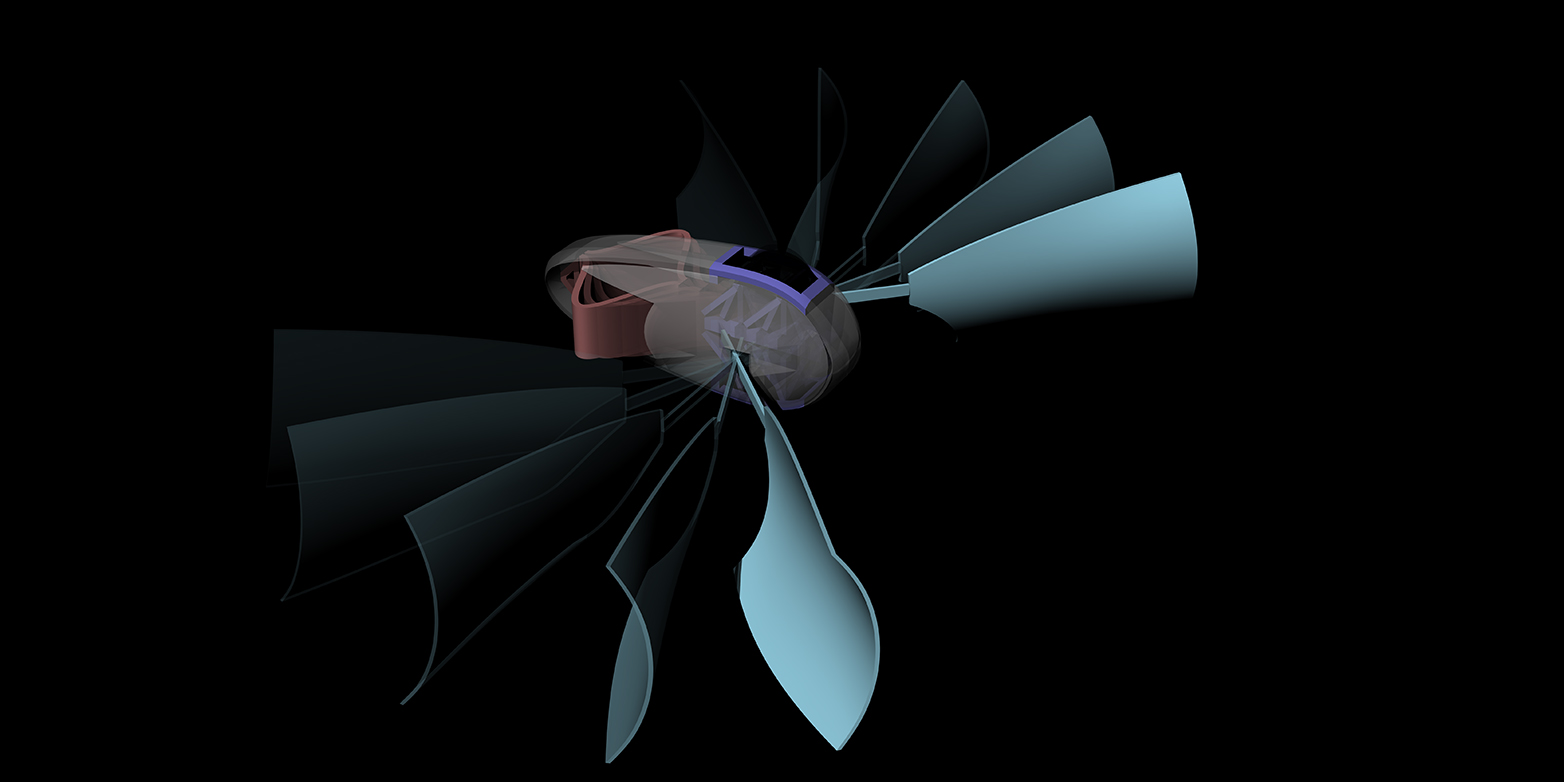
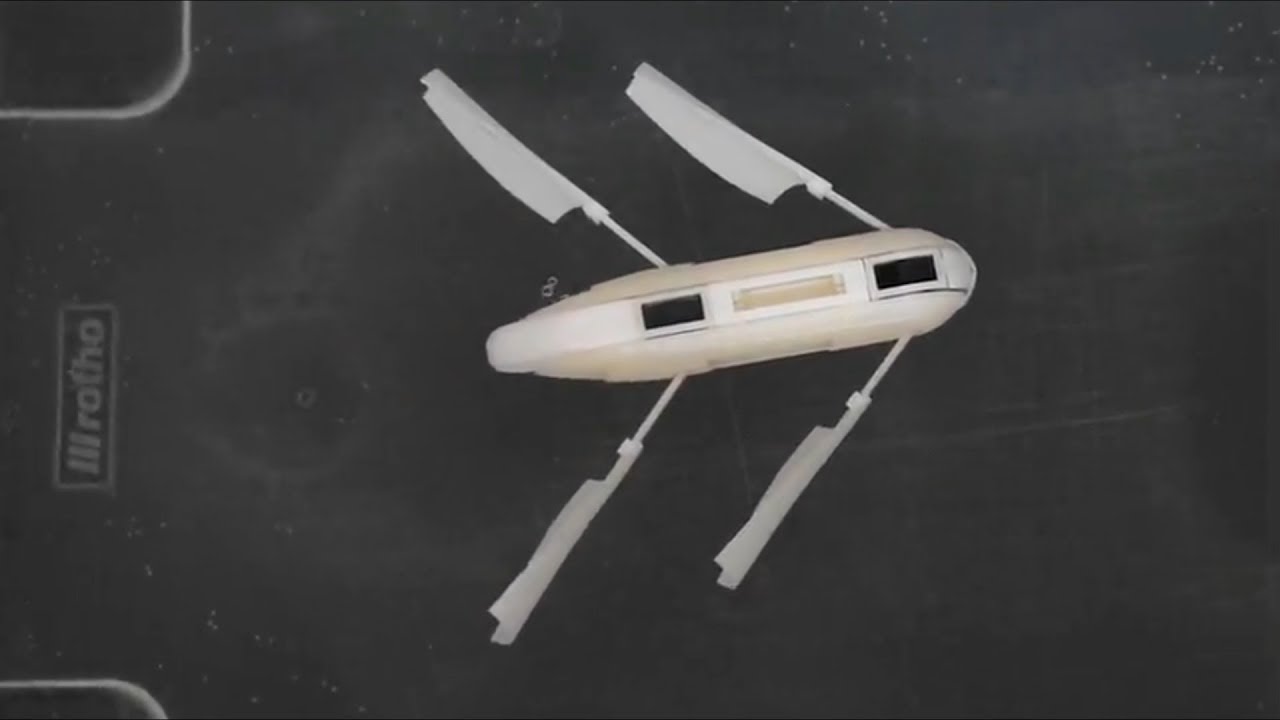
Nell'ambito di uno studio di fattibilità, gli scienziati hanno sviluppato un mini-sottomarino lungo 7,5 centimetri dotato di pagaie, che hanno prodotto interamente con una stampante 3D. I ricercatori riportano i loro risultati nella rivista pagina esternaPNAS.
Le pale sono mosse da un elemento di azionamento, il cui fulcro è costituito da due strisce di plastica a memoria di forma, sviluppate dall'ETH Shea e dal suo dottorando Tim Chen. Le strisce di plastica fungono da "muscoli" per la barca. Sono progettate per espandersi in acqua calda. Quando l'acqua in cui galleggia il mini-sottomarino si riscalda, l'espansione dei "muscoli" fa sì che un elemento di sollevamento si ripieghi rapidamente, innescando un colpo di pagaia. Il movimento, la forza e il tempo del colpo di pagaia sono definiti con precisione dalla costruzione del sottomarino.
Veicolo con diversi elementi di trasmissione
Attualmente, i mini-veicoli sono progettati in modo che ogni elemento di sollevamento possa eseguire un colpo di pagaia e poi debba essere ripristinato manualmente. Tuttavia, come sottolineano gli scienziati, è possibile costruire robot sottomarini complessi con molti elementi di azionamento. Per esempio, gli scienziati hanno già costruito un mini-sottomarino che rema in avanti con un colpo, deposita una moneta e infine si tira indietro al punto di partenza con un secondo colpo di pagaia nella direzione opposta. Chi siamo ha utilizzato le dimensioni dei muscoli di plastica per definire la sequenza in cui vengono attivati i colpi di pagaia: Le strisce di plastica sottili si riscaldano più rapidamente nell'acqua calda e quindi reagiscono più velocemente di quelle più spesse.
Ulteriori sviluppi ipotizzabili includono l'uso di plastiche che non reagiscono alla temperatura dell'acqua, ma ad altre influenze ambientali come l'acidità o il contenuto salino dell'acqua.
"Il fulcro del nostro lavoro è che abbiamo sviluppato un nuovo e promettente tipo di azionamento che è completamente stampato in 3D e non richiede una fonte di alimentazione esterna", afferma l'ETH Professor Shea. Una possibile applicazione futura potrebbe essere un veicolo a basso consumo per l'esplorazione degli oceani.
Riferimenti
Chen T, Bilal OR, Shea K, Daraio C: Harnessing bistability for directional propulsion of soft, untethered robots, PNAS, 15 maggio 2018, doi: pagina esterna10.1073/pnas.1800386115
Chen T, Shea K: An Autonomous Programmable Actuator and Shape Reconfigurable Structures Using Bistability and Shape Memory Polymers, 3D Printing and Additive Manufacturing, 24 maggio 2018, doi: pagina esterna10.1089/3dp.2017.0118