Laboratoire de canetons pour les flottes de véhicules autonomes
? l'ETH Zurich, les étudiants apprennent la conduite autonome sur un modèle réduit avec une flotte de mini-taxis : dans le cours "Duckietown", ils travaillent avec des étudiants de Montréal et de Chicago sur les problèmes qui préoccupent les développeurs de voitures autonomes dans le monde entier.
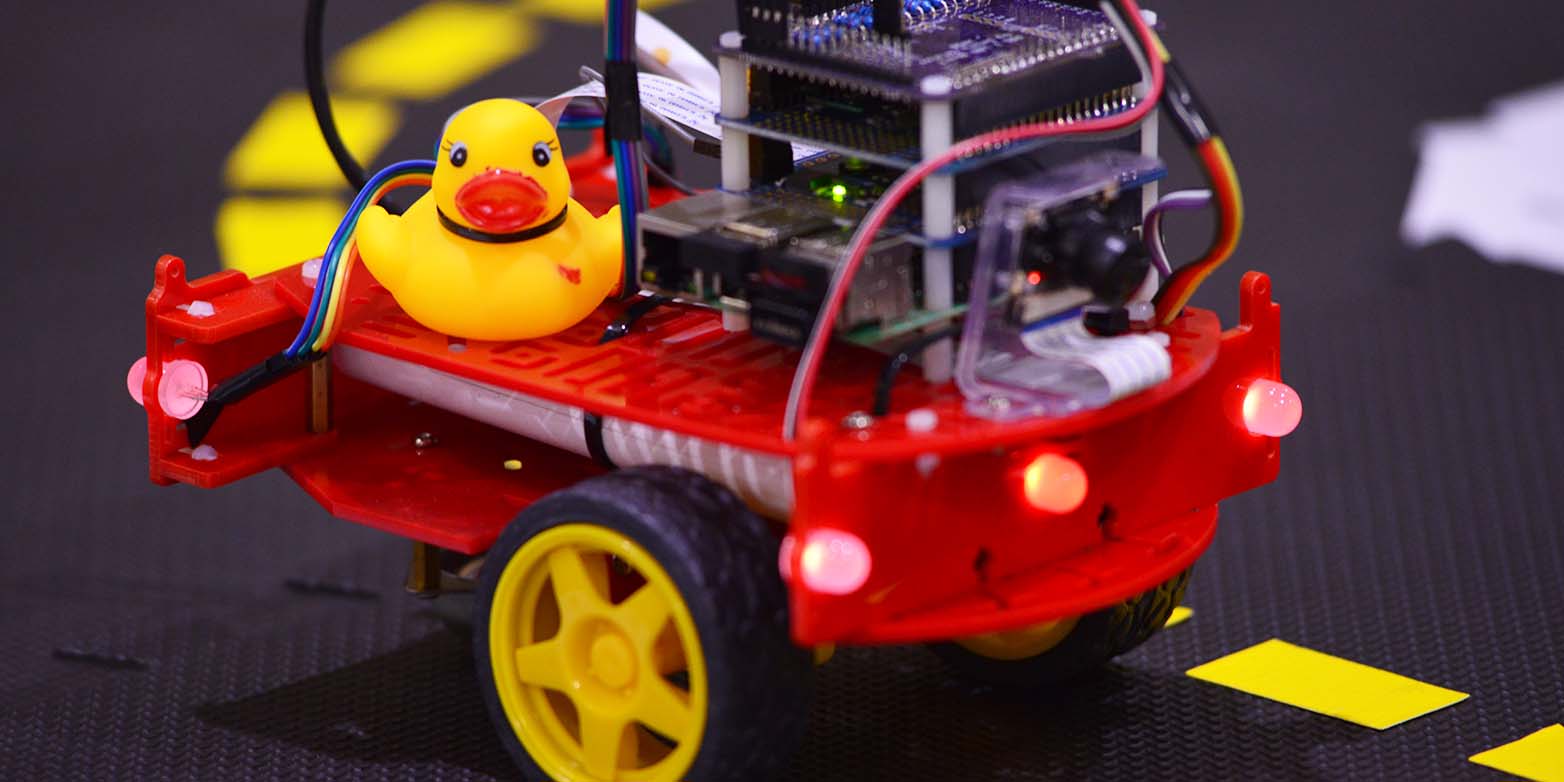
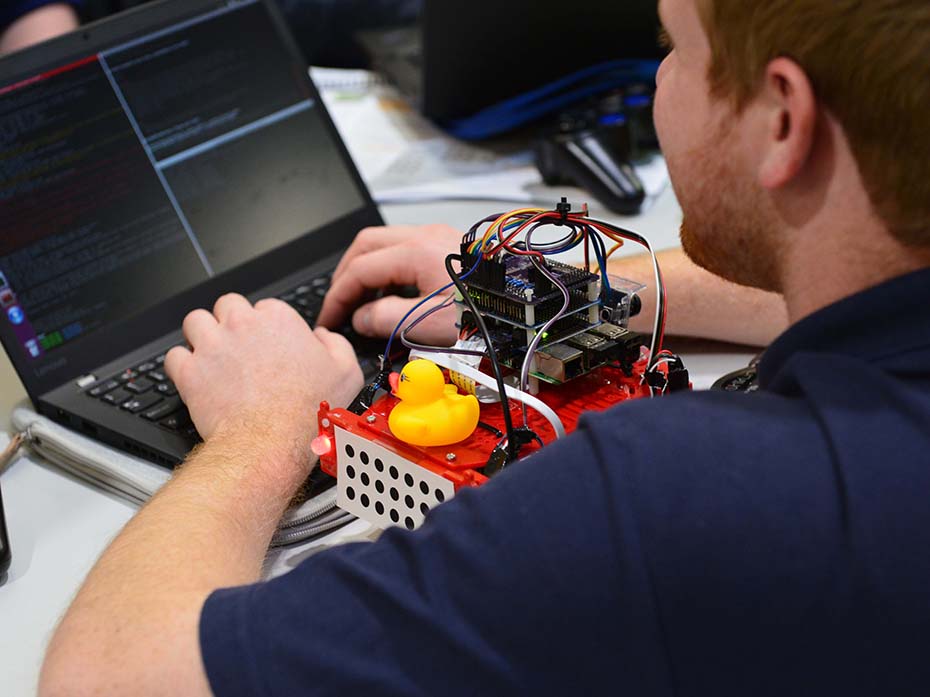
Une caméra, un mini-ordinateur bon marché, un ch?ssis, des roues et des lampes à Led : Il n'en faut pas beaucoup plus pour créer un "Duckiebot". C'est ainsi qu'Andrea Censi et Jacopo Tani - enseignants du nouveau cours de conduite autonome à l'ETH Zurich - appellent les petits robots taxis. Censi et Tani sont ma?tres-assistants dans le groupe de recherche d'Emilio Frazzoli, professeur au Département de génie mécanique et des procédés et spécialiste mondialement reconnu des systèmes autonomes.
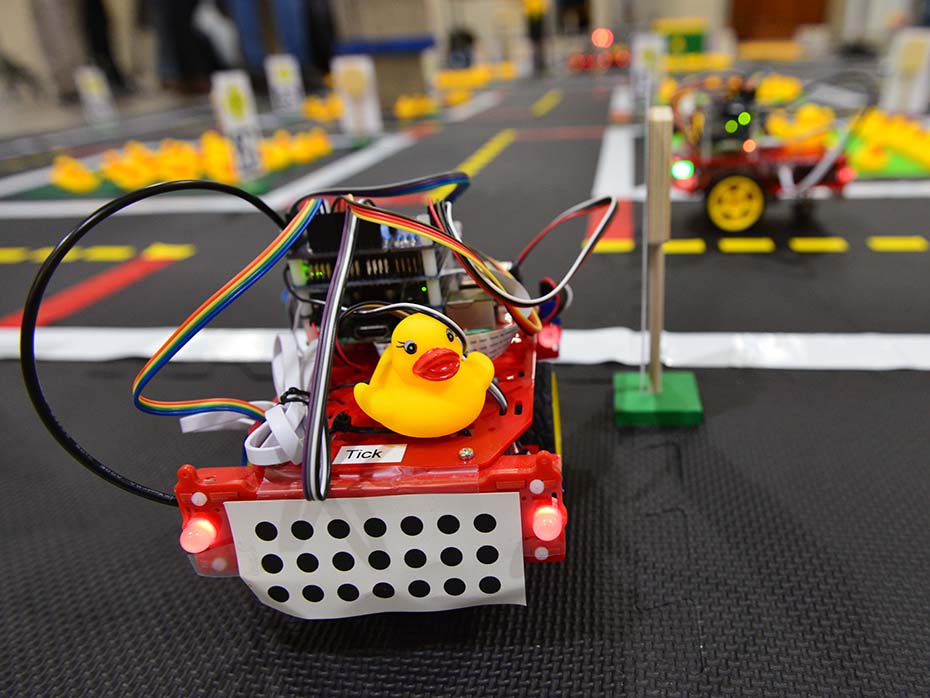
Mardi, ils ont présenté leur projet d'enseignement "Duckietown". a été présenté dans le hall principal de l'ETH Zurich : Sur chaque petit robot-taxi, un petit canard en caoutchouc fait office de marque de fabrique. Ils circulent de manière autonome dans "Duckietown", une ville modèle avec des rues, des panneaux, des signaux lumineux et des places de parking marqués avec du ruban adhésif. Les taxis-canards s'arrêtent aux intersections, se laissent la priorité et freinent en cas d'embouteillage.
Résoudre des problèmes en équipe
Avant d'y parvenir, les étudiants planchent pendant des jours sur le matériel et les logiciels. Ce qui semble être un jeu d'enfant est en fait très compliqué. Si compliquée que les étudiants ne peuvent résoudre les t?ches qu'ensemble. Pendant un semestre, ils travaillent en groupes sur un domaine partiel. Le cours mise sur la collaboration globale. Des étudiants en master de l'ETH Zurich, de l'Université de Montréal et du Toyota Technological Institute de Chicago travaillent en même temps sur le même projet.
Censi a développé le cours avec Frazzoli et Liam Paull, aujourd'hui professeur à l'Université de Montréal, fin 2015 au Massachusetts Institute of Technology (MIT). En 2017, Censi a rejoint Frazzoli à l'ETH, où ils poursuivent le développement de Duckietown.
Selon Censi, "nous attachons beaucoup d'importance à faire de ce cours une expérience collective". Ma?triser un grand projet en équipe, de manière coordonnée et sous la pression du temps, est un objectif d'apprentissage - et une compétence très demandée dans l'industrie. Nicolas Lanzetti, étudiant en master en robotique et contr?le, explique : "Normalement, nous étudions seuls pour nos examens. Ici, en tant que classe, nous avons un objectif commun : à la fin, les projets de groupe doivent tous fonctionner ensemble".
L'étudiante en master Sonja Brits ajoute : "Nous avons eu beaucoup de liberté dans la manière d'aborder le projet et de collaborer. Mais cela nous a aussi donné une grande responsabilité vis-à-vis des autres étudiants". Censi y voit l'avenir de l'apprentissage : "La théorie, les connaissances de base, peuvent être mises à disposition en ligne. La valeur d'une haute école comme l'ETH Zurich réside dans le fait que tant de spécialistes talentueux se rencontrent et collaborent en un même lieu".

Plus compliqué que dans le livre
L'un des grands défis de la robotique et de la conduite autonome réside dans l'interaction entre différents éléments. Les composants matériels, les capteurs et les moteurs doivent être mis en harmonie. Dans chaque Duckiebot lui-même - et dans la flotte autonome également entre eux. Les étudiants ne se cassent pas les dents sur la théorie, mais sur les détails pratiques : matériel défectueux, composants qui ne s'harmonisent pas, plans qui ne fonctionnent pas. Censi explique : "Gr?ce à Duckietown, les étudiants se rendent compte que les choses ne fonctionnent pas comme dans les livres. En robotique, les systèmes parfaits n'existent pas. Ici, ils apprennent à s'en servir".
Pendant que les étudiants apprennent aux taxis canards à suivre la ligne latérale sans à-coups, à ne pas se laisser distraire par la lumière du soleil ou à se garer proprement, ils créent aussi un travail de pionnier. Les groupes travaillent tous sur le même code. Dans des documentations, ils mettent leurs solutions à la disposition des futurs étudiants - et au-delà, des chercheurs du monde entier : le projet suit l'idée de l'open source. Les modules d'enseignement, le code et la documentation sont librement accessibles en ligne. Censi espère ainsi inciter les passionnés de robotique d'autres institutions à faire rouler les Duckiebots en essaim de manière autonome.
Du laboratoire à l'asphalte
Il y a de fortes chances que les connaissances et les lignes de code des cours permettent à l'avenir de guider des voitures sur de vraies routes. Emilio Frazzoli est cofondateur de l'entreprise Nutonomy, qui prévoit de lancer un service de taxis avec des véhicules autonomes à Singapour et dans d'autres villes. Andrea Censi y travaille en tant qu'architecte système.
Mais les étudiants mettent également en pratique ce qu'ils ont appris sur l'asphalte : en 2017, l'association académique de sport automobile AMZ a envoyé pour la première fois une voiture de course automotrice à propulsion électrique sur le circuit - et a remporté le concours Formula Student Driverless à Hockenheimring. Plusieurs étudiants du cours de Censis travaillent aujourd'hui dans l'équipe AMZ Driverless et préparent la prochaine course.
Impressions de Duckietown